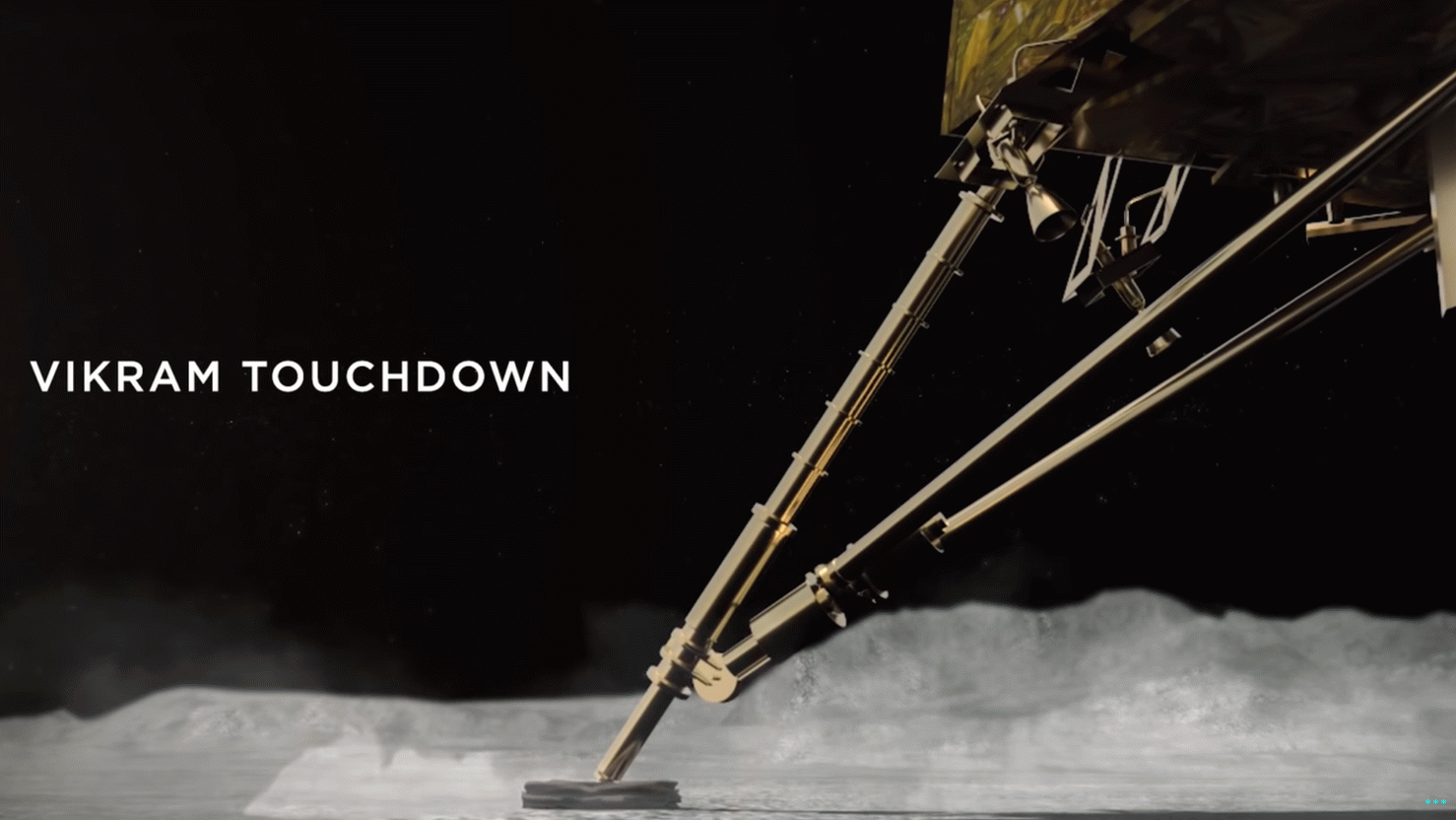
금요일, Vikram 착륙선은 연약한 달 표면에 착륙합니다. 이 갤러리는 그 방법을 강조 일어날 것이다. ISRO
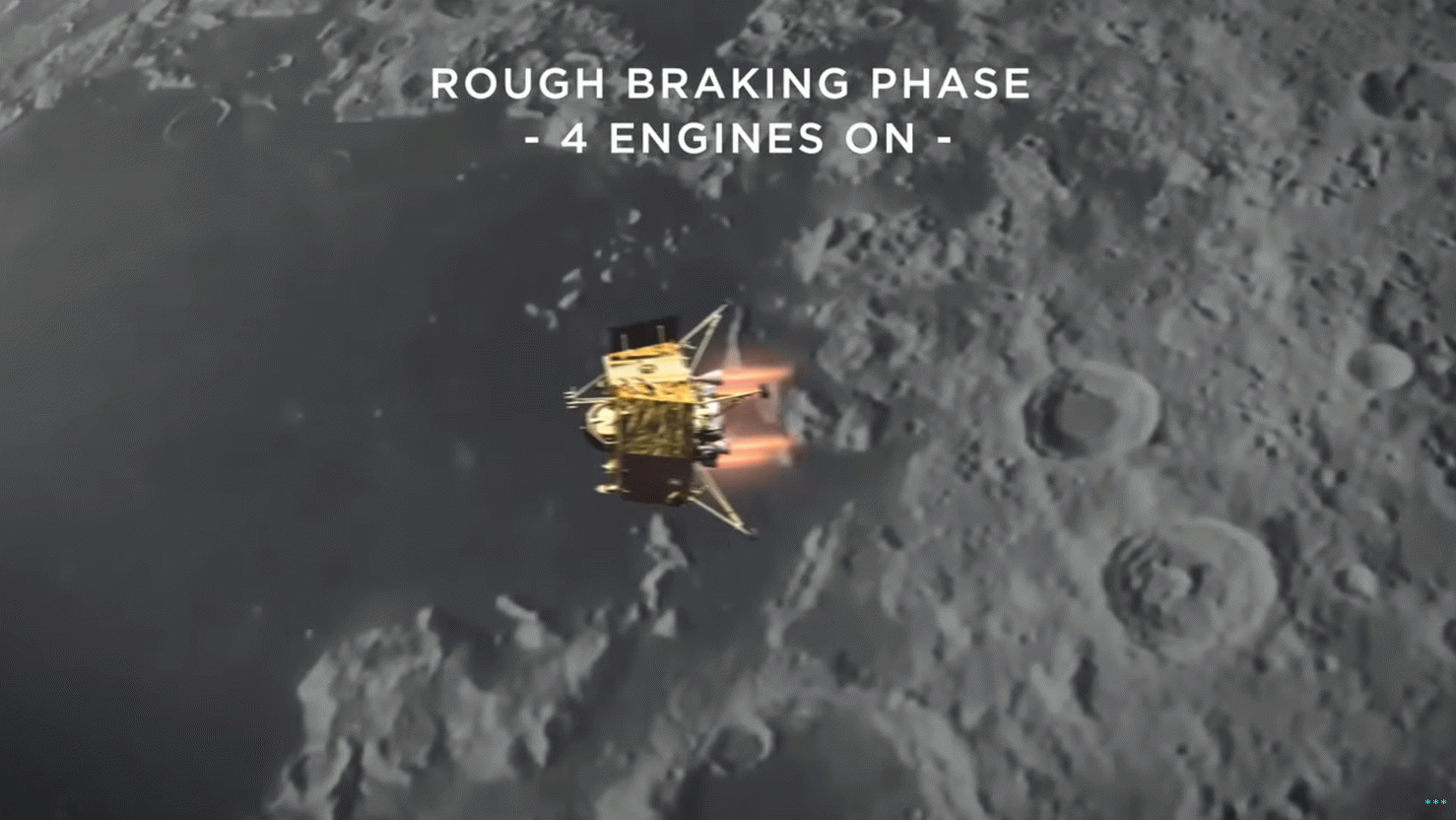
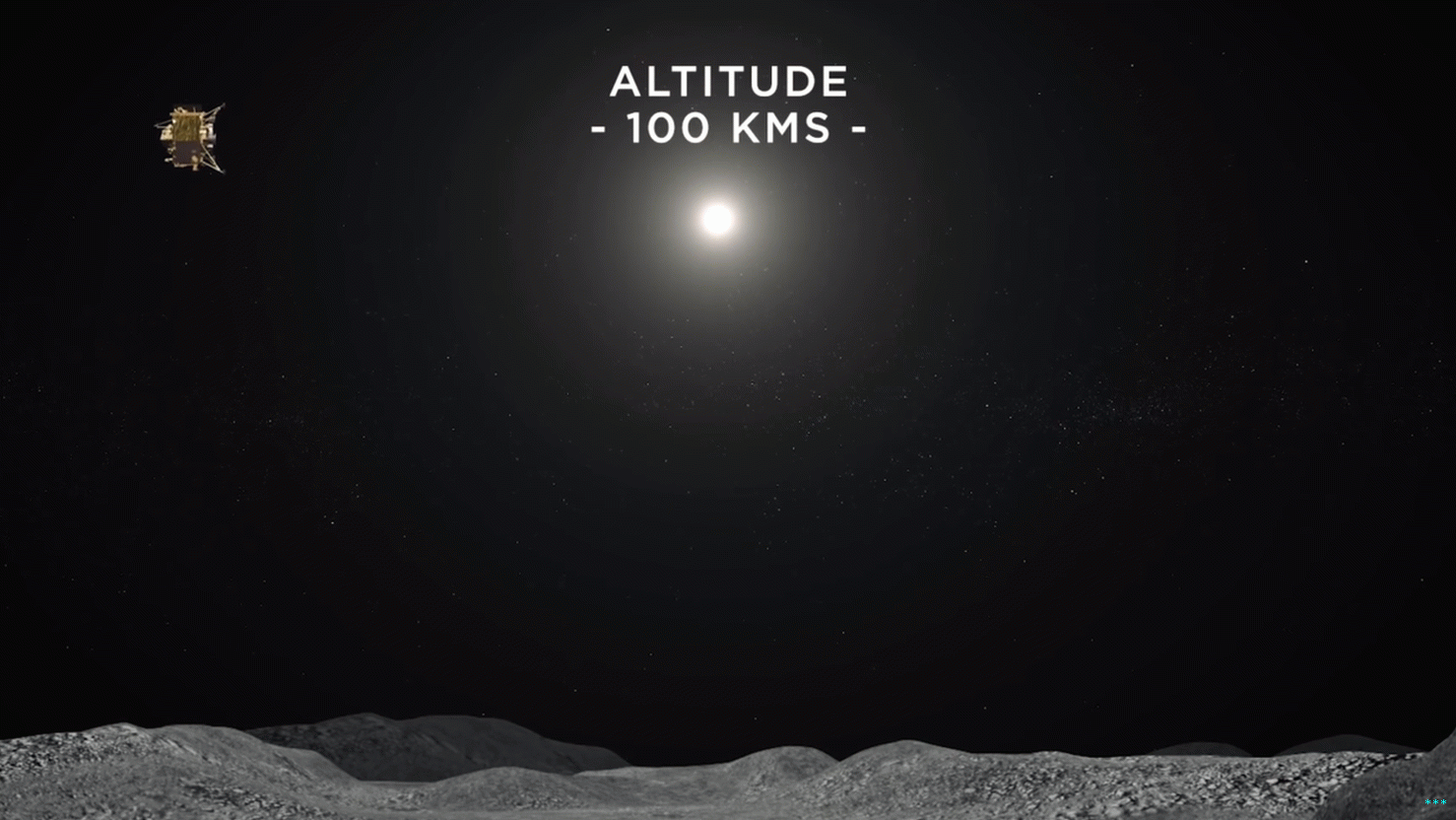
Vikram은 35km x 101km 궤도에서 하강을 시작합니다. ISRO
이 고도에서 4 개의 외부 엔진이 움직임을 제어합니다. ISRO
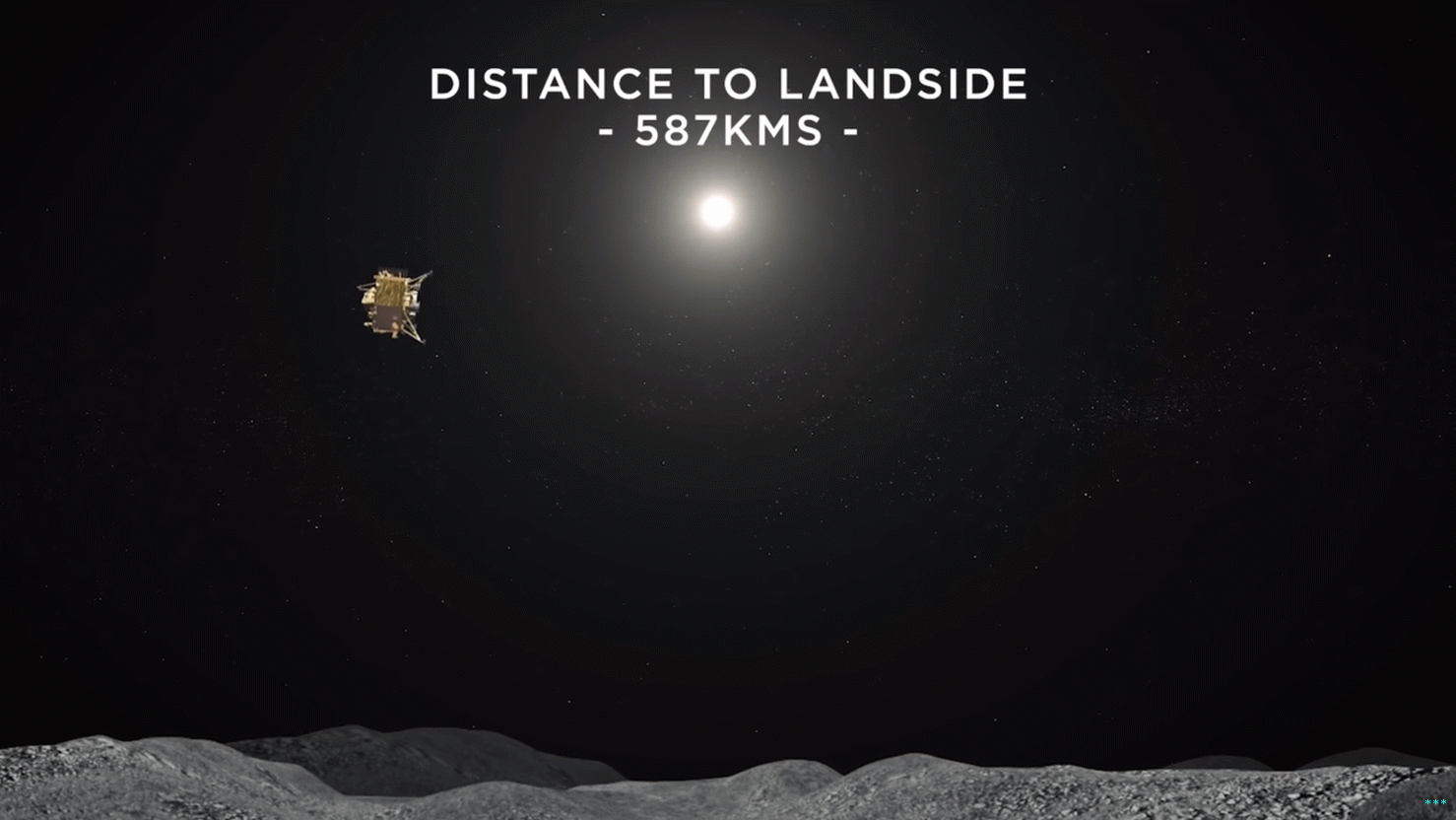
착륙 지점은 600km 가량 떨어질 것입니다. ISRO
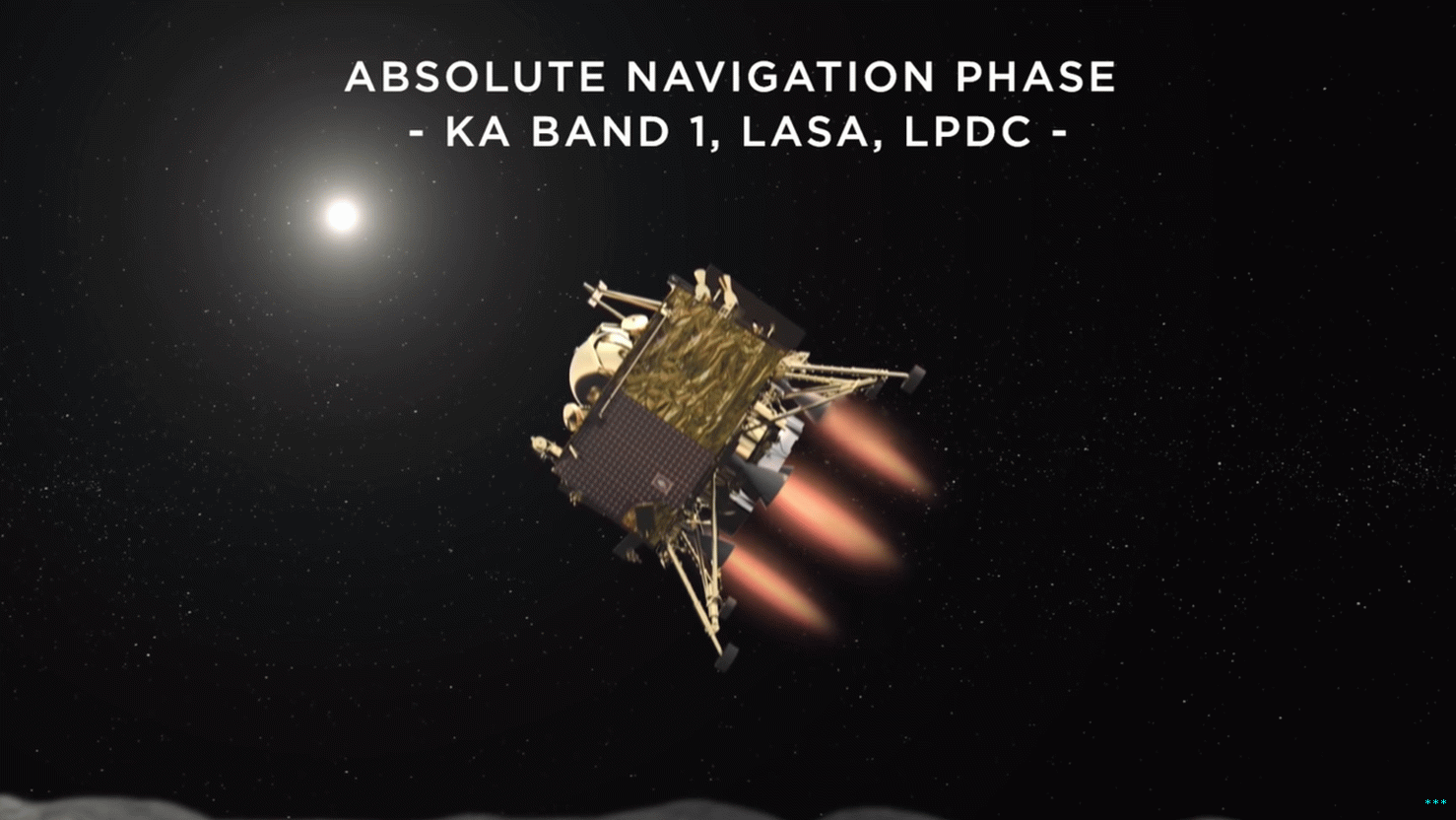
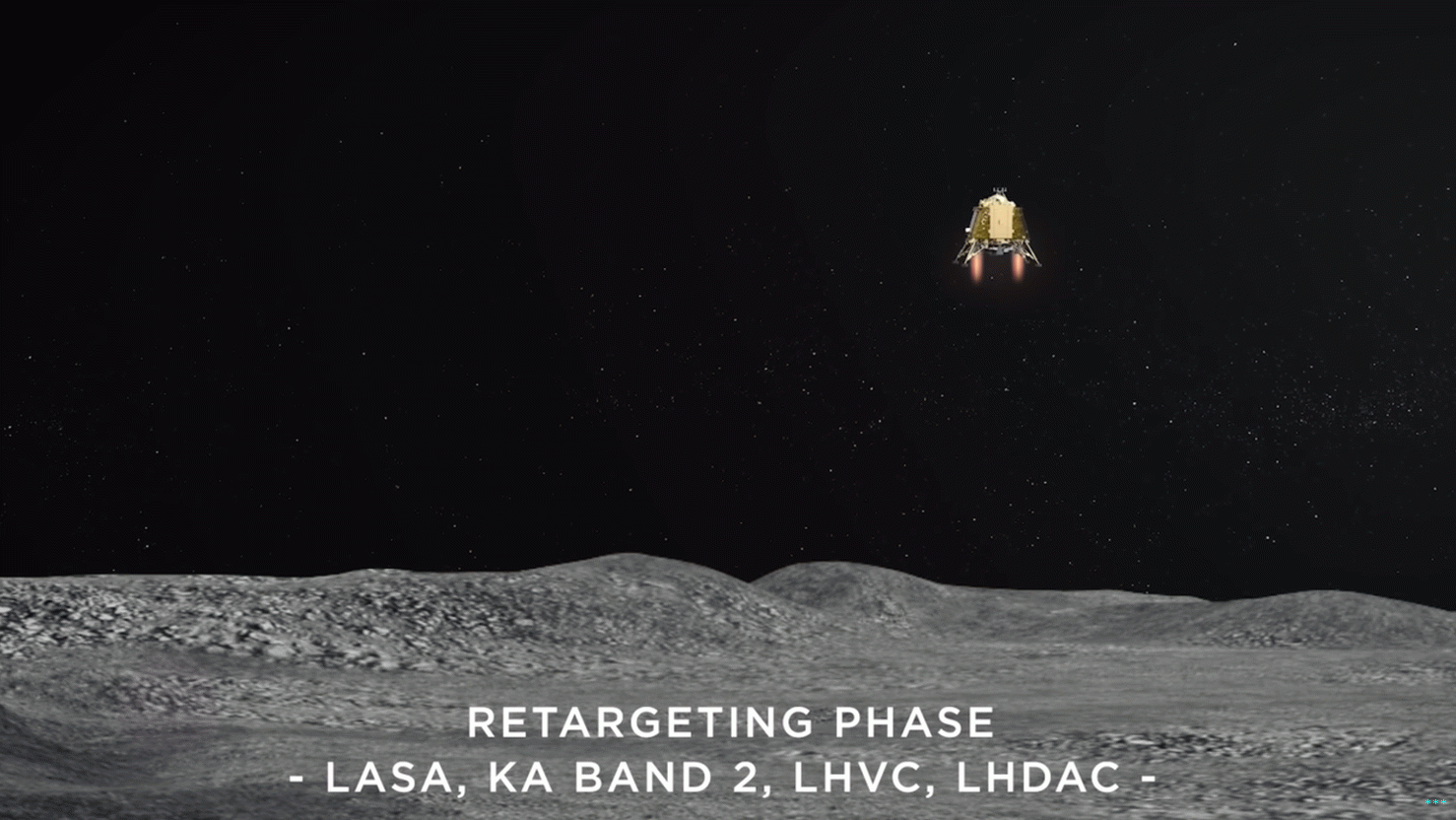
이 단계에서 우주선은 KA 대역 고도계를 사용합니다. 레이저 고도계 및 착륙선 위치 감지 카메라 비행 컴퓨터. ISRO
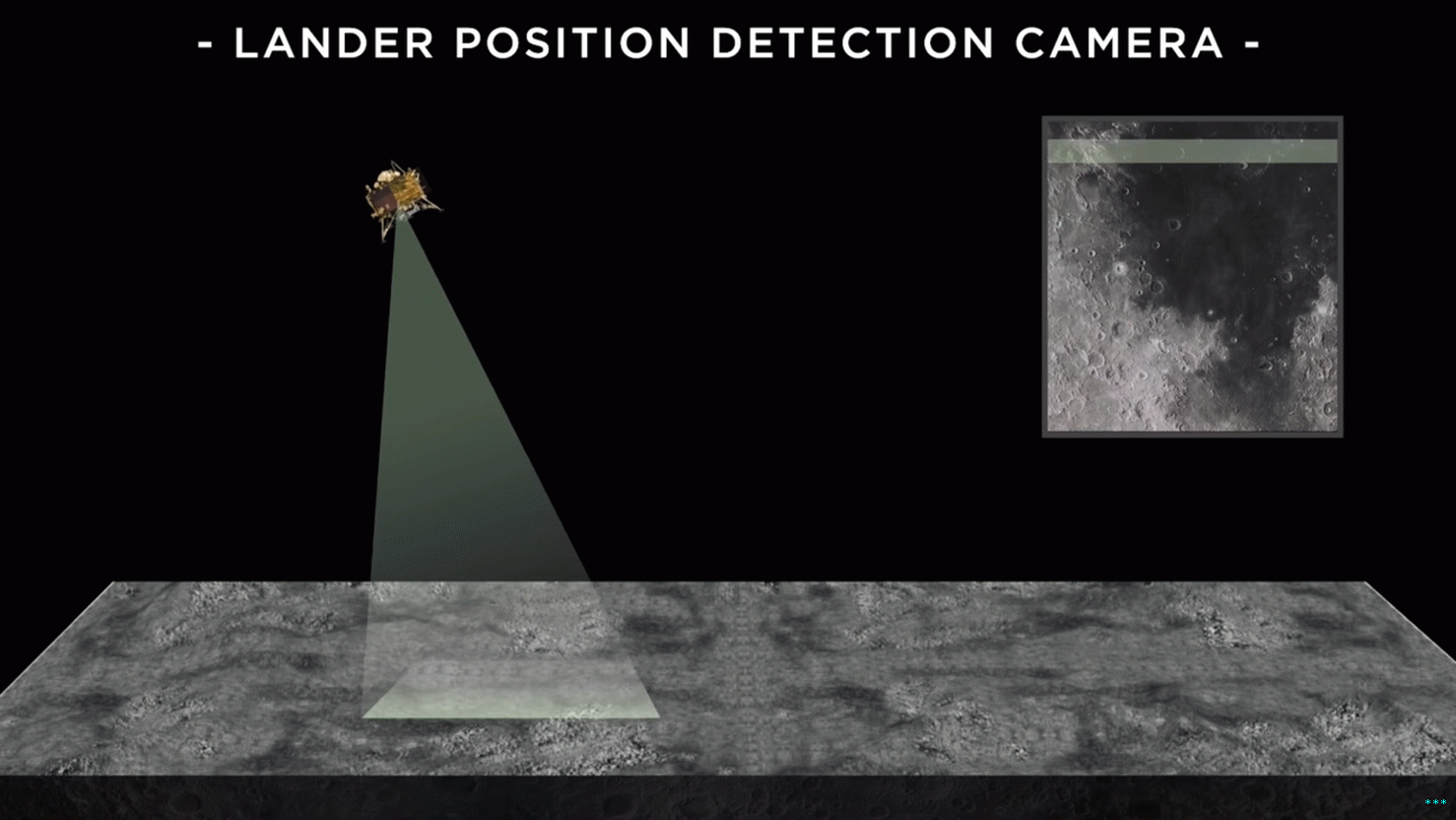
착륙선 위치 감지 카메라가 작동 중입니다. ISRO
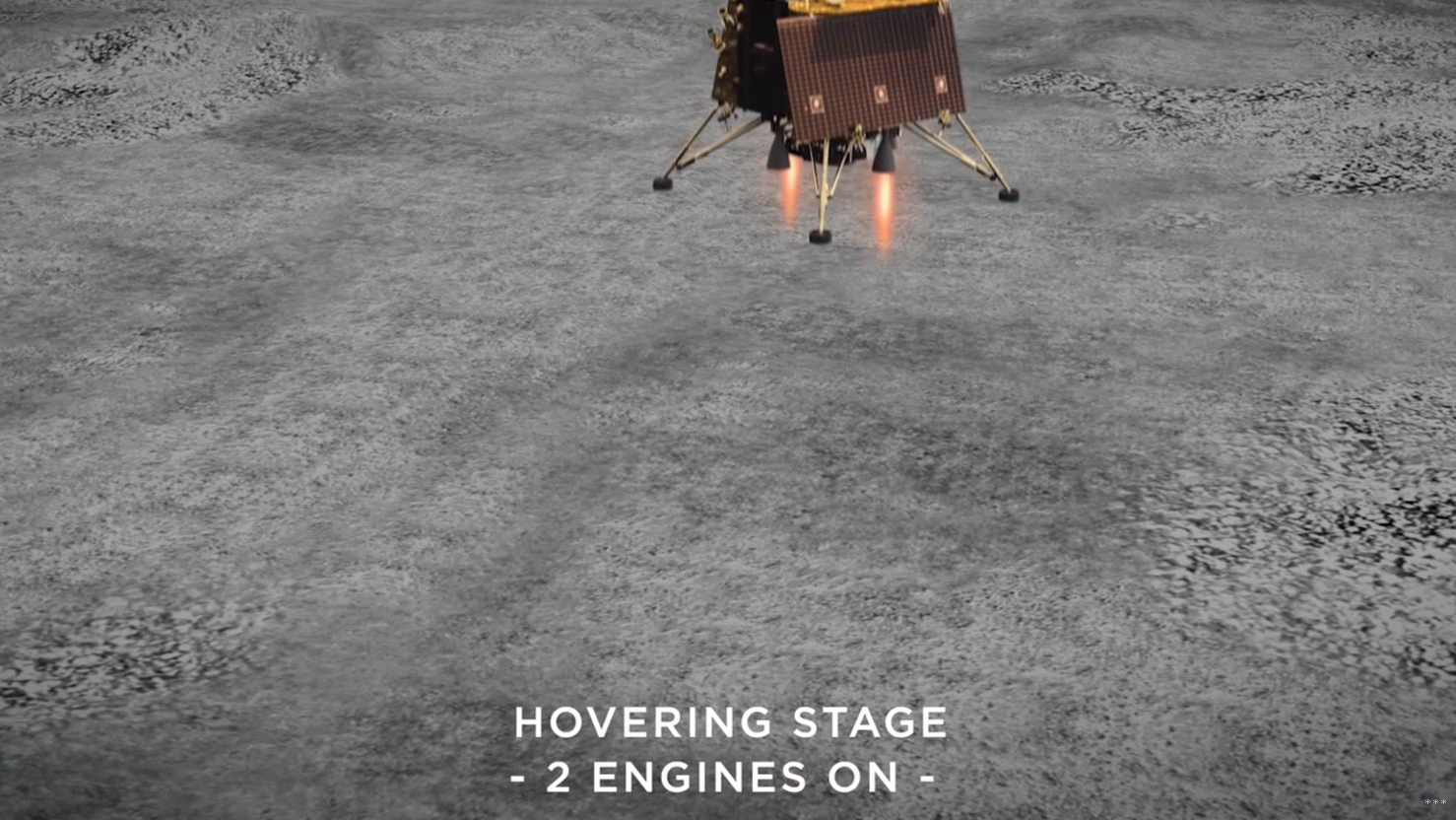
정밀한 제동 단계에 진입함에 따라 우주선은 각각 800 뉴턴의 추진력을 가진 두 개의 엔진. ISRO

이 단계에서 착륙선은 레이저 고도계를 사용합니다. KA 대역 고도계 및 착륙선 수평 속도 카메라. ISRO
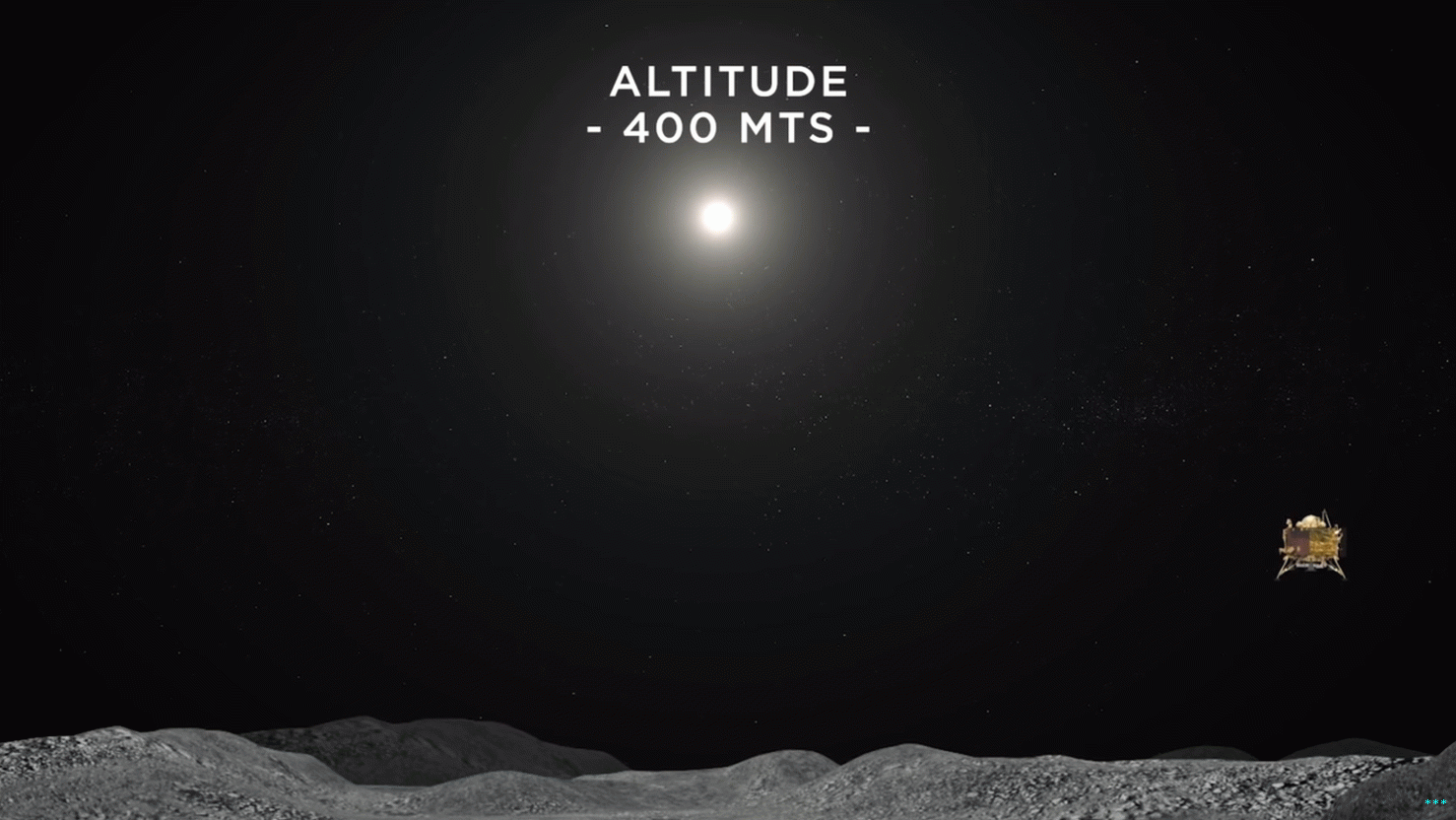
400 미터에서 정확한 착륙 지점을 선택하기 시작합니다. ISRO
더 많은 레이저, 더 많은 카메라. ISRO

잘만되면 지금은 느려질 것이다. ISRO
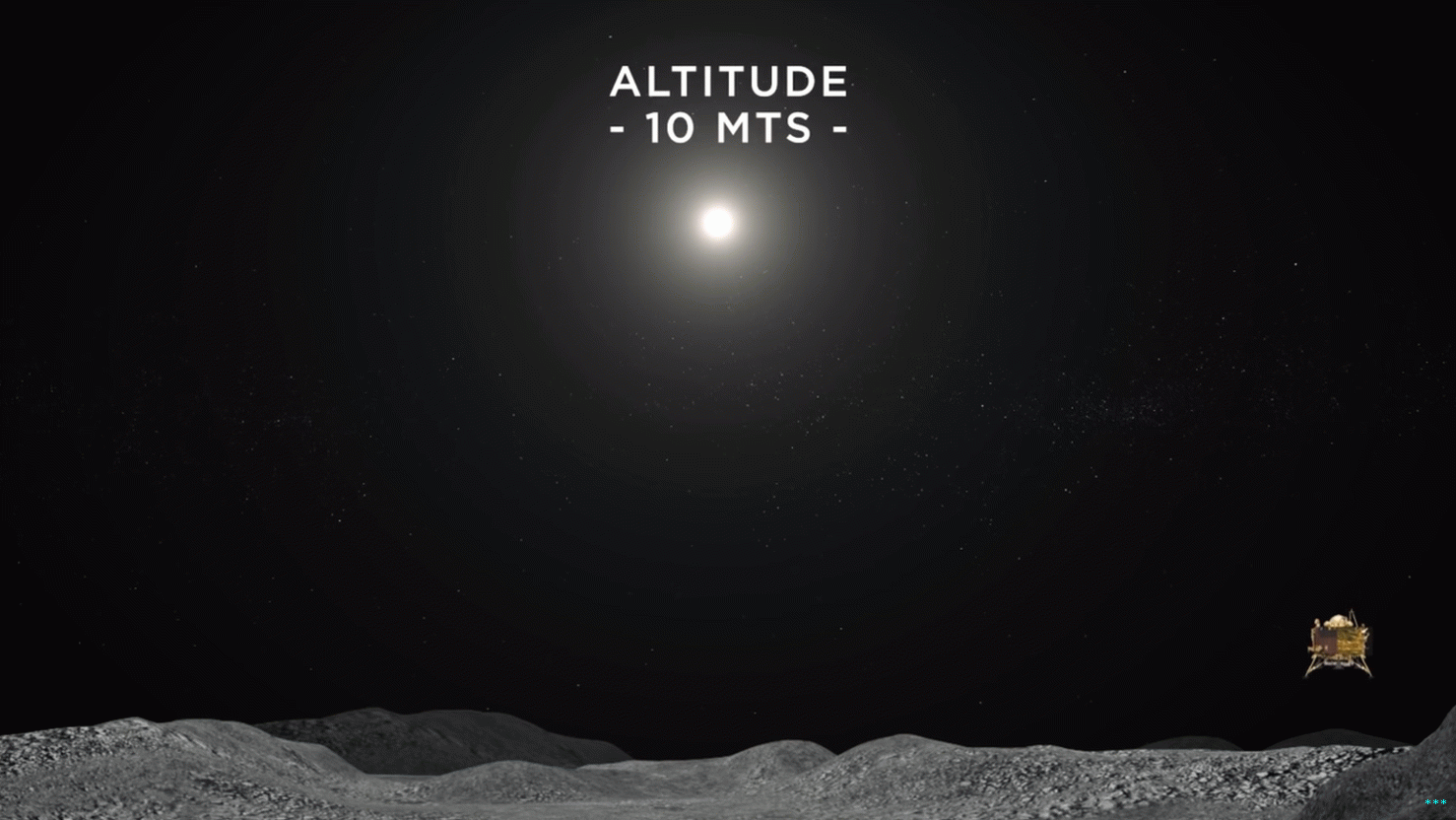
최종 하강. ISRO

하강의 마지막 부분에 대한 중앙 엔진. ISRO
잘만되면 ISRO
4:45 pm 동부 표준시 업데이트 : 인도 공간에 따르면 기관, ISRO, 착륙선의 하강은 달 위 2.1km 고도. 이 시간 이후 의사 소통은 우주선과 함께 길을 잃었다. 하강 데이터는 착륙 시도에 어떤 문제가 있었는지 추가로 평가합니다.
원본 게시물 : 7 월 말 인도 로켓 베이 오브 우주 정거장에서 찬드라 야안 -2 임무를 시작했습니다 벵골. 이것은 인도가 달에 보낸 두 번째 우주선입니다 첫 번째는 부드러운 착륙을 시도합니다. 출시 이후 찬드라 야안 -2 우주선이 지난 6 주를 나선형으로 보냈다 달 궤도를 향해 도달하고 착륙 할 착륙선을 방출합니다 표면에 닿으십시오.
인도는 지금까지 Vikram 착륙선으로 역사를 만들고자합니다. 미국, 러시아 및 중국 우주 기관 만이 달에 성공적으로 착륙했습니다. 금요일이 방문의 날입니다 시도는 동부 표준시 오후 3시 30 분 또는 그 직후에 시작되어야합니다. (19:30 UTC).
추가 자료
인도는 달에 야심 찬 임무를 시작했습니다
그러나 4 월에 이스라엘이 지원하는 민간 회사가 달 표면에 우주선을 부드럽게 착륙시키는 것은 어려운. Beresheet 차량의 주 엔진이 약 10km 고장 달 위의 속도로 달을 쳤다 초당 약 130 미터.
Chandrayaan-2 임무 착륙선은 Vikram의 이름을 따서 명명되었습니다 사라 바이 (Sarabhai) 국가 우주 프로그램 창립자. 1.47 톤 착륙� 태양 전지판을 가지고 있으며, 음력 1 일 동안 생존하도록 설계되었습니다. 2 주 동안 지구에서 음력을 연구하는 시간 수 빙원으로서의 표면과 잠재력.
착륙선은 로버뿐만 아니라 세 가지 과학 실험을 가지고 있습니다 이름은 Pragyan으로 산스크리트어로 “지혜”로 번역됩니다. 그만큼 6 개의 바퀴가 달린 27kg 로버는 최대 500 개를 횡단 할 수 있어야합니다. 달을 가로 질러 미터. 또한 전체 생존을 희망합니다 온보드 태양 광 발전의 음력.
추가 자료
이스라엘의 개인 우주선이 목요일에 추락했습니다. [업데이트]
현재 궤도, 35km x 101km에서 Vikram 착륙선은 금요일에 하강을 시작합니다. 착륙선 인 달에 안전하게 도달하기 위해 표면으로 안내하는 데 도움이되는 몇 가지 도구가 있습니다. 온보드 비행 컴퓨터의 판단을 돕는 카메라 포함 그 위치와 수평 속도 및 위험 방지. 그것 3 개의 고도계도 있습니다.
인도 우주국은 Vikram이 초당 2 미터의 속도로 달 표면. 대상이됩니다 70.9 도의 두 분화구 사이의 높은 평원에 상륙 지점 남쪽으로, 동쪽으로 22.7도. 인도 우주 조직 ISRO는 YouTube에서 착륙 시도를 스트리밍 할 것이라고 말했습니다.
Vikram 착륙 시도.
ISRO의 이미지 목록